Laser Scanning Systems - study material
2. Categorization of Laser Scanners
Scanning systems could be categorized according to various criteria. Depending on the placement, scanners are divided into terrestrial or airborne (aerial). If the scanner is placed on the Earth’s surface (or close to the Earth’s surface) or on a vehicle moving on the Earth’s surface (a car, a train, a robot arm, etc.), it is a terrestrial laser scanner. If the instrument is placed on an aerial vehicle (airplane, helicopter, UAV), it is an airborne laser scanning system.
Terrestrial systems are further divided into static and kinematic, depending on whether they are placed stationary or on a moving vehicle (car, trolley, carriage, etc.). The most frequent realization of the kinematic laser scanning system is a so-called mobile mapping system located on vehicles (Fig. 4a) or a scanning system in the form of a railway track geometry measuring trolley (Fig. 4b). Kinematic systems placed on vehicles are used mainly for scanning of roads and their infrastructure and streets. Scanning trolleys are mainly used for documentation of rail corridors, railway track scanning including all equipment that belongs to the railway as well as for as-built documentation railway tunnels, etc.

Figure 4 Kinematic terrestrial laser scanning systems: a) Leica Pegasus mobile maping system (Leica Geosystems, 2019) and b) Amberg Rail Clearance IMS 5000 (Amberg Technologies, 2018)
The next criterion for the categorization of laser scanners is the field of view and scanning range. According to that, scanners can be divided into cameras, panoramic, and hybrid scanners (Fig. 5). In the case of camera scanners, the laser beam is deflected (to points of a raster) by oscillating mirrors or prisms what enable the deflection of the laser beam into a relatively small field of view. Panoramic laser scanners use rotating prisms or rotating mirrors as projection mechanisms. The laser beam is deflected in the vertical direction only with minimal limitation (under the instrument), while the deflection in the horizontal direction is realized by the rotation of the scanner around its vertical axis. The hybrid system is a combination of the panoramic and camera scanner system. These scanners are able to scan 360° in the horizontal direction with a significantly limited field of view in the vertical direction. An oscillating mirror in combination with rotation around the vertical axis of the instrument is used as a projection mechanism.
Another important property of scanners is the scan rate (speed of scanning) expressed by the number of measured points per second. Present scanners with short and middle range enable to measure several 100,000 points per a second (up to two million points per second). Scanners with long range generally have lower scan rate, which reaches several 10,000 up to 100,000 points per second. It is necessary to point out that the abovementioned classification of laser scanners is based on the present instruments offered which, however, develop over the time, therefore the categorization of the terrestrial laser scanning systems may change over the time (especially the scan rate of long-range instruments increases).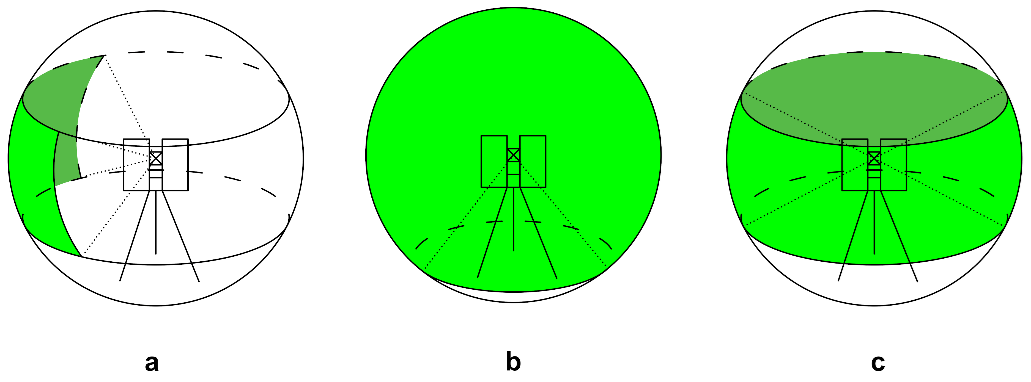
Figure 5 Categorization of TLS according to the field of view: (a) camera scanner, (b) panoramic scanner, and (c) hybrid scanner